Sistema definido con zpk
Extracción de datos de un sistema definido a partir de los ceros, polos y ganancia
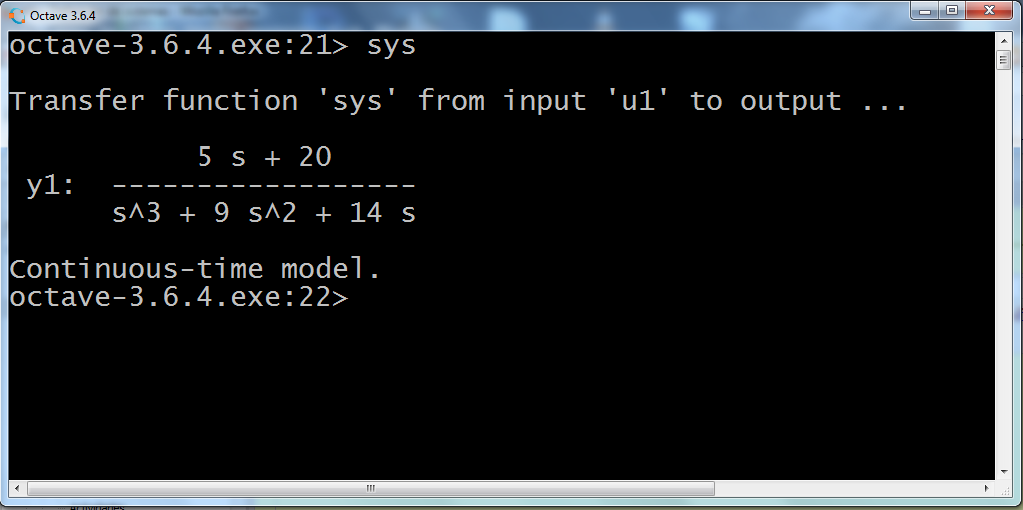
Si queremos visualizar la función de transferencia basta con llamar a la variable con la que hemos definido el sistema, tal como se muestra en la siguiente imagen:
Si se quiere acceder a los polinomios de la función de transferencia de este sistema se puede es necesario hacerlo con la siguiente función:
[num,den]=tfdata(sys)
En num y den se devuelven los valores con los coeficientes de los polinomios del numerador y denominador, respectivamente.
Si quisieramos obtener una representación de estados de este sistema habría que usar la función ssdata.
[a,b,c,d]=ssdata(sysg);
En a,b,c,d se devuelven los valores de las matrices de estado.
Para sacar los ceros y polos de la representación se puede usar la función zpkdata:
[ceros,polos,ganancia]=zpkdata(sysg);
Ejemplo |
|
|
Dada la función de transferencia:
|
|
Obra colocada bajo licencia Creative Commons Attribution Non-commercial Share Alike 3.0 License