Definición de sistemas lineales en Octave
Sistema definido con ss
Extracción de datos de un de sistema definido a partir de la representación de estados
Para visualizar directamente los valores de las matrices basta con llamar a la variable que define el sistema, tal como se muestra en la siguiente figura:
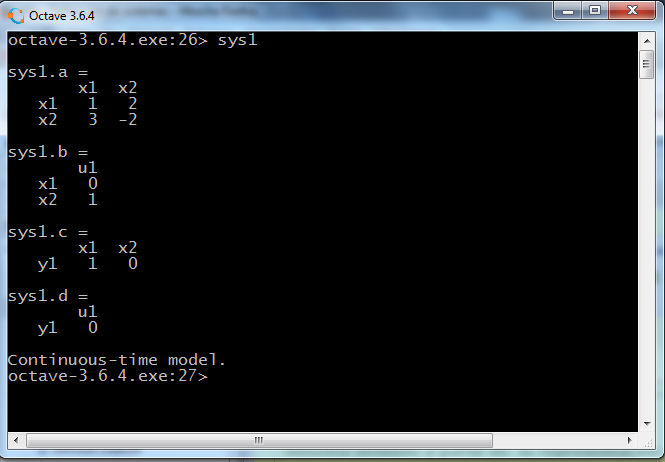
Obsérvese que estas variables están alamcenadas en sys.a, sys.b, sys.c y sys.d.
Si queremos acceder a la función de transferencia podemos hacerlo con la siguiente llamada:
[num,den]=tfdata(sys)
donde se estñán almacenando en num y den los valores de los polinomios de la función de transferencia.
Para sacar los ceros y polos de la representación se puede usar la función zpkdata:
[ceros,polos,ganancia]=zpkdata(sys);
Obra colocada bajo licencia Creative Commons Attribution Non-commercial Share Alike 3.0 License