Ceros, polos y ganancia estática
Obtención de los polos de un sistema
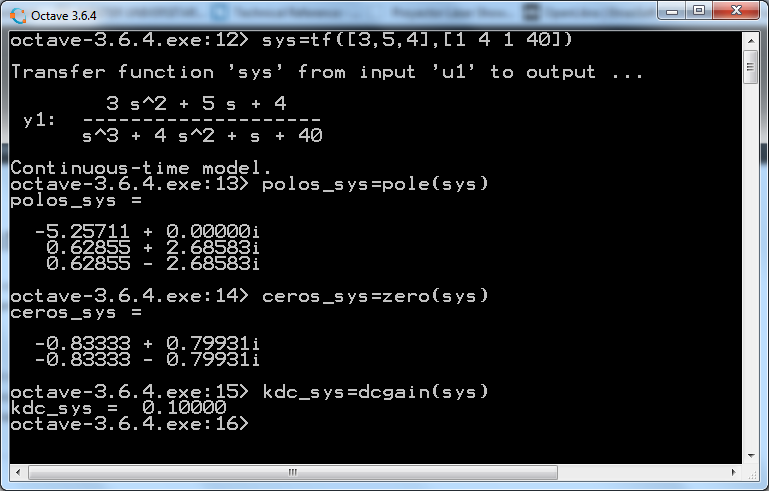
Para La obtención de los polos usaremos el siguiente comando:
polos=pole(sys);
donde sys es un sistema LTI (sistema lineal invariante temporal).
Obtención de los ceros de un sistema
La obtención de los ceros de un sistema se consigue con la siguiente función:
ceros=zero(sys);
donde sys es un sistema LTI.
Obtención de la ganancia estática de un sistema
Para La obtención de la ganancia estática de un sistema usaremos la siguiente función:
kdc=dcgain(sys);
donde sys es un sistema LTI.
Ejemplo |
|
|
Definir el sistema:
|
|

Representación en el plano complejo de los polos y ceros
Si se desea visualizar los polos y ceros de un sistema en el plano complejo se puede hacer uso de la función pzmap. Su uso es el siguiente:
sys=pzmap(sys)
Un ejemplo de una representación obtenida con pzmap aparece en la siguiente figura.
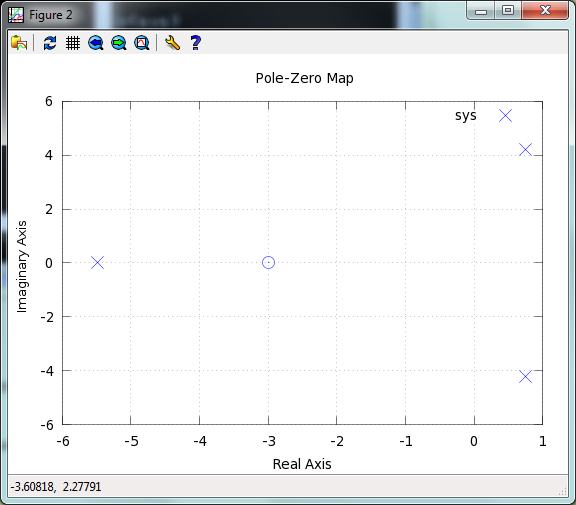
Obsérvese que los ceros se representan mediante un circulo (o) y los polos mediante cruces (x).
Obra colocada bajo licencia Creative Commons Attribution Non-commercial Share Alike 3.0 License