Realimentación básica
La configuración básica de un sistema reliamentado es la que se presenta en la figura:
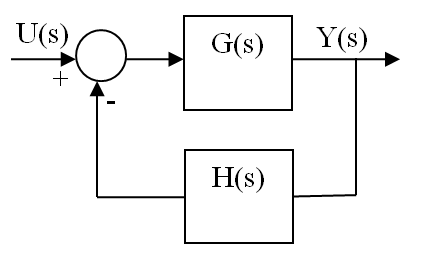
Obsérvese que el signo de realimentación es negativa, que es lo que encontraremos siempre en un sistema de control. Para obtener la representación de este sistema, la forma más sencilla es usar la función feedback. A continuación se muestra la sintaxis más básica:
sys=feedback(sysg,sysh);
Si la realimentación fuese positiva habría que añadir un signo "+" como tercer argumento:
sys=feedback(sysg,sysh,"+");
Realimentación unitaria
En el caso de que tengamos realimentación unitaria, tal como se muestra en la figura, la llamada a feedback es más sencilla.
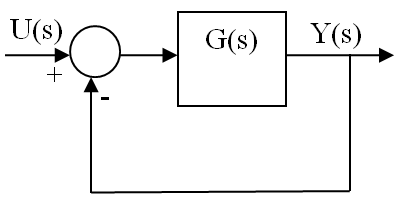
En este caso el sistema se definiría mediante:
sys=feedback(sysg);
Si fuse realimentación positiva se añadiría un "+":
sys=feedback(sysg,"+");
Otras opciones de la función feedback pueden consultarse a través de la ayuda en linea (help @lti/feedback)
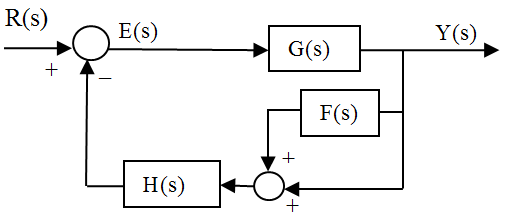
Ejemplo: Reducción de un diagrama de bloques con feedback |
|
|
Considérese el problema de la figura donde:
Definir el sistema Y(s)/R(s) usando la función feedback. |
|
 ,
, ,
, 